Z会のレゴ講座は2023年4月で終了しています。また、LEGO WeDo2.0は生産終了しています。以下は記事執筆当時の内容になりますので参考程度にご覧ください。
おうちで学ぶロボットプログラミング
中でもZ会のプログラミング講座はプログラミング教室 顧客満足度2019年最優秀賞。
我が家で受講を始めた「レゴエデュケーション」を使用したZ会のプログラミング講座with LEGO Education(基礎編)の第8回体験レポをお伝えします。

全12回(1年間)のZ会プログラミング講座の体験レポートを順次行なっていきます。

Z会のLEGOプログラミング講座は無くなりましたが、そのほかにもプログラミング講座があります。
資料請求は無料でできますのでご興味あります方は取り寄せてみてください。
\ 自宅で好きな時間に学習できる! /
また、この記事ではLEGO WeDo2.0を使用しています。
 うさ子
うさ子WeDo2.0は少し古いタイプのLEGOになります。
LEGO WeDo2.0は生産終了になり、「LEGOスパイクベーシック」という新しいモデルに変わっています。

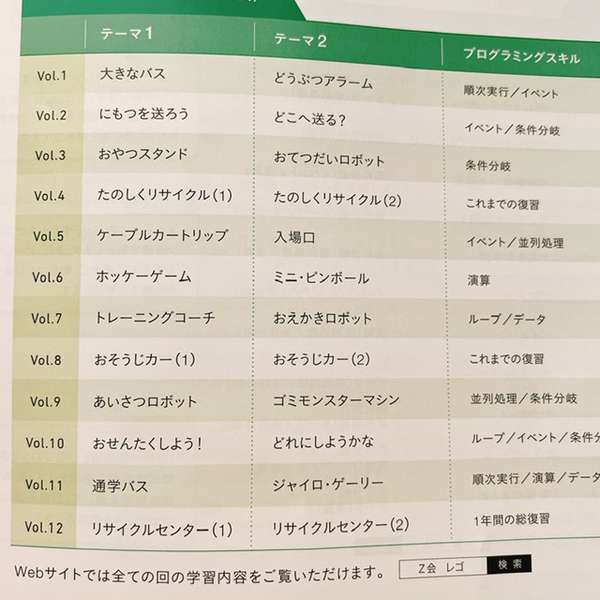
作る内容や教材は異なりますが、講座で学べるプログラミングスキルはWeDo2.0と同じです。下の画像は当時のZ会レゴプログラミング講座のパンフレットに記載されていたもの。
Z会プログラミング第8回目の講座内容
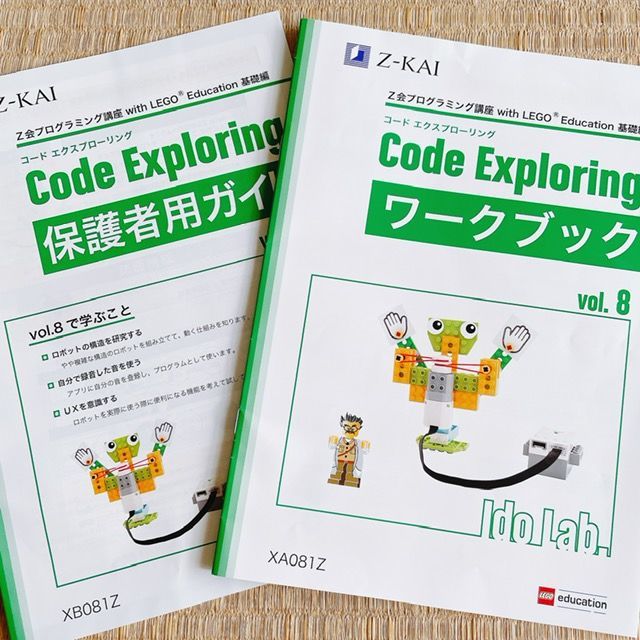
テキストは毎月2冊届きます
- ワークブック(子ども用テキスト) Vol.8
- 保護者用ガイド Vol.8
各1冊ずつ。
どちらもごく薄いのでテキスト嫌いなお子さんでも比較的とっつきやすい内容ですよ。
レゴは1回目のみに届き、残りの11回は同じレゴを使用して学習します
所要時間
- 標準学習時間1回90〜150分×2回
初回学習は2回分で30分ほどで終わりましたが、
徐々に作業が難しくなってきて、少し時間がかかるようになります。
8回目の今回はトータルで1時間ほど。
なので「90分もかかるの?そんな時間ないよ!」と思ってらっしゃるかたはご安心ください
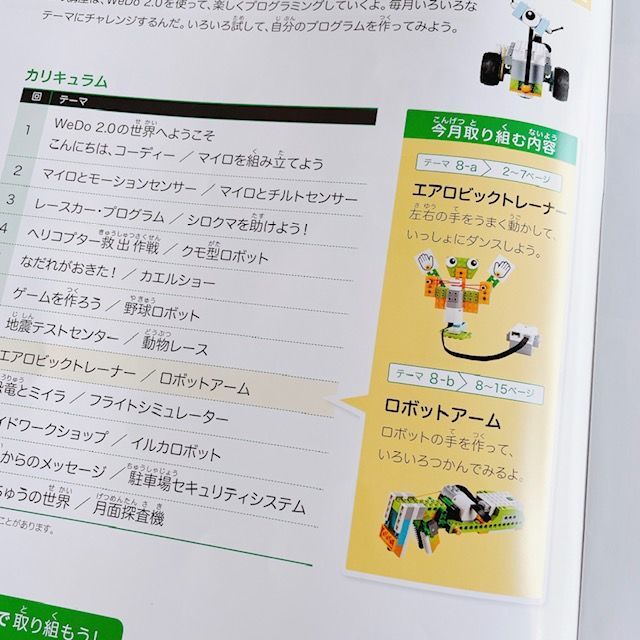
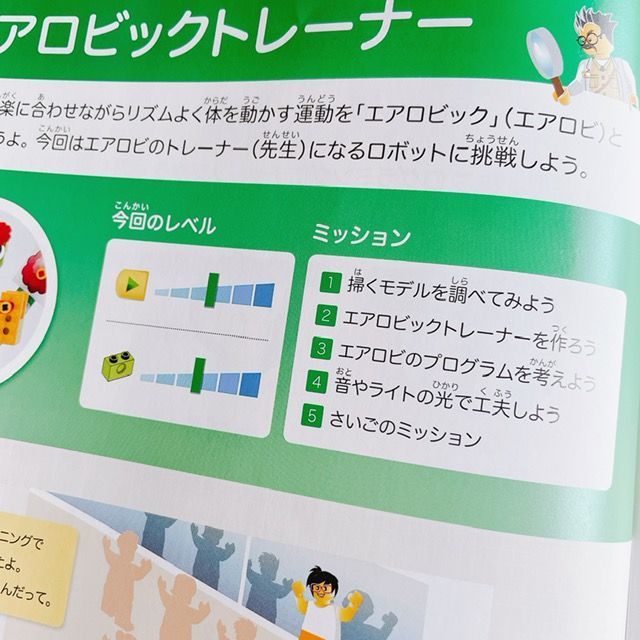
8回目はエアロビックトレーナーとロボットアームを作ります
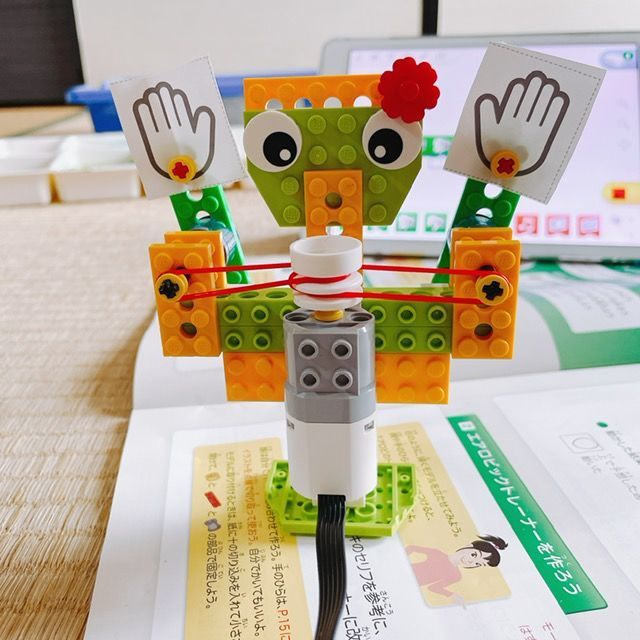
エアロビックトレーナー
掃き掃除のモデルを作り、それを立たせてトレーナーロボットにします。
エアロビックトレーナーの学習内容
今回の内容は以下の4点です
- 掃くモデルを調べてみよう
- エアロビックトレーナーを作ろう
- エアロビのプログラムを考えよう
- 音やライトの光で工夫しよう
- さいごのミッション
掃くモデルを調べてみよう
作り方はレゴアプリに詳しく表示されているので、アプリを見ながらこの通りに組み立てていきます。
掃き掃除のような動きをするモデルを作り、部品の動き方を見ます。

動き方はこんな感じ
エアロビックトレーナーを作ろう
掃くモデルを見る向きを変え、立たせることで動くパーツを「手」に見立てていきます。

手にひらのパーツはテキストに印刷されていました(紙製です)
切り抜いて使用します。
エアロビのプログラムを考えよう
テキストに沿ってトレーナーらしい動きのプログラムを組んでいきます。

音やライトの光で工夫しよう
音、光を組み込みます。
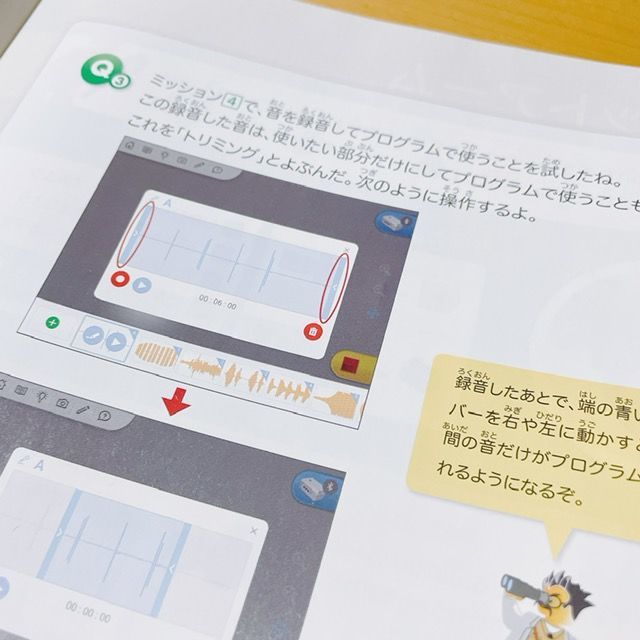
自分で録音した音を使用することもできるので、今回のレッスンではその作業も試します。
自分で使いたい音を試行錯誤することもプログラミング的思考につながるようです。
録音した音をトリミングすることも可能。
ということなのですがうちの子は録音を嫌がり、結局アプリに内蔵された効果音を使用しました。
さいごのミッション
テキストに書かれた問題を解きます
また、先程出てきた「録音した音のトリミング」方法もこちらに記載されています。
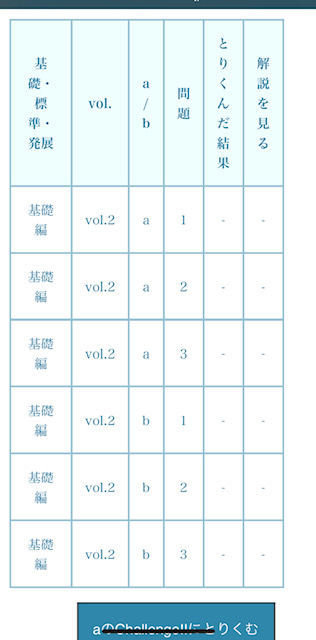
その後受講生専用Webページからチャレンジに取り組みます
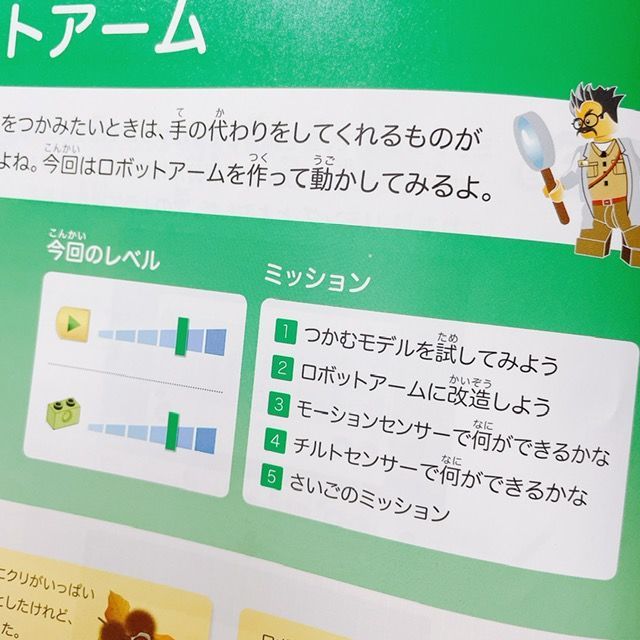
ロボットアーム
ロボットアームとは、危ないものなど「手で掴みたくないものを掴んでくれる」ための「手の代わり」のものです。
掴むモデルを作成し、センサーで掴むような動きをつけていきます。

ロボットアームの学習内容
今回の内容は以下の5点です
- つかむモデルを試してみよう
- ロボットアームに改造しよう
- モーションセンサーで何ができるかな
- さいごのミッション
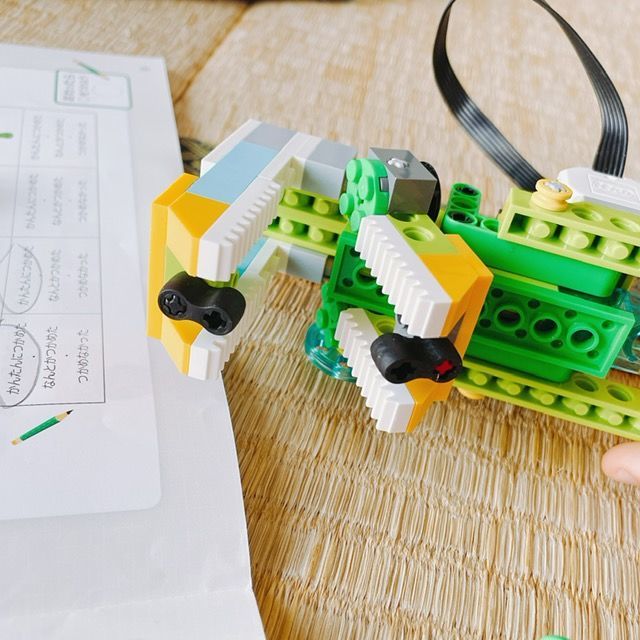
つかむモデルを試してみよう
まずはつかむモデルを作成します

タイヤなど4種類のサイズの部品を使って、掴めるか掴めないか試します。

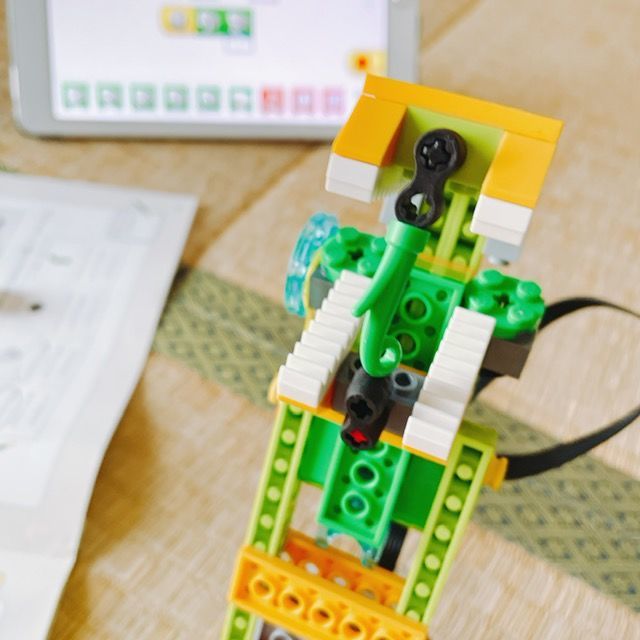
ロボットアームに改造しよう
分離していたスマートハブをつかむモデルにくっつけ、かつ見た目をロボットアームっぽくしていきます。
参考に組み立て方法も記載されていますが、自由に改造してOK

先程はなかったパーツかが口についているので細かいものも掴みやすくなりました
このパーツのおかげで細長い部品も縦につかむことができます。
モーションセンサーで何ができるかな
モーションセンサーを使って、掴みたいものに近づいたら勝手に掴んでくれる動きをプログラムします。
- 掴みたいものの前に行ったらグラバーが開く
- 閉じるまでに3秒ほど待つ
- 閉じる前に音を鳴らすなどし、よりわかりやすくする
チルトセンサーで何ができるかな
傾きを感知するチルトセンサーを使って、ロボットアームを右や左、手前や奥に傾けた時に動くようにします。
先程のモーションセンサーとは異なり、こちらはちょっと動かし方が難しかったです
(上手く反応してくれない)
というわけでモーションセンサー時ですが、こんな感じで動きます。
さいごのミッション
こちらも先程同様、テキストに書き込む問題を解き、その後受講生Webページよりチャレンジに解答します
今月のミッションに取り組む
最後に受講生ページから今月のミッションに取り組みます
テーマに沿って30秒程度の動画を投稿します
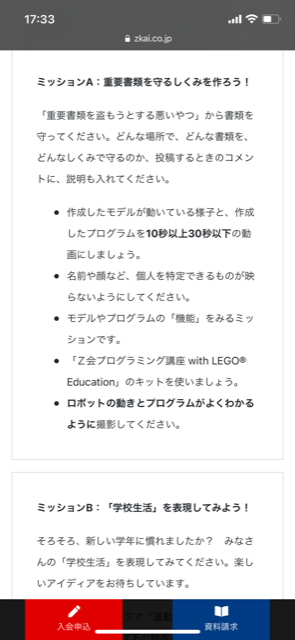
このミッションは1人何度でも投稿できるようです
2021年7月16日〜2021年8月15日までのミッション
- お手伝いお運びロボットを作ろう
- 夏休みを表現してみよう
- 学んだことを説明しよう
ミッションの投稿は必須ではありませんが、投稿者にはポイントが付与され
ポイントが貯まると新しい組立図がもらえます。
8回目感想
毎月、テキストが届くのを楽しみにしています。
前回の第7回は動きがイマイチわかりづらく、イマイチ楽しめていなかったのでそれに比べると今月は簡単な内容です。
わかりやすい動きで楽しめました。
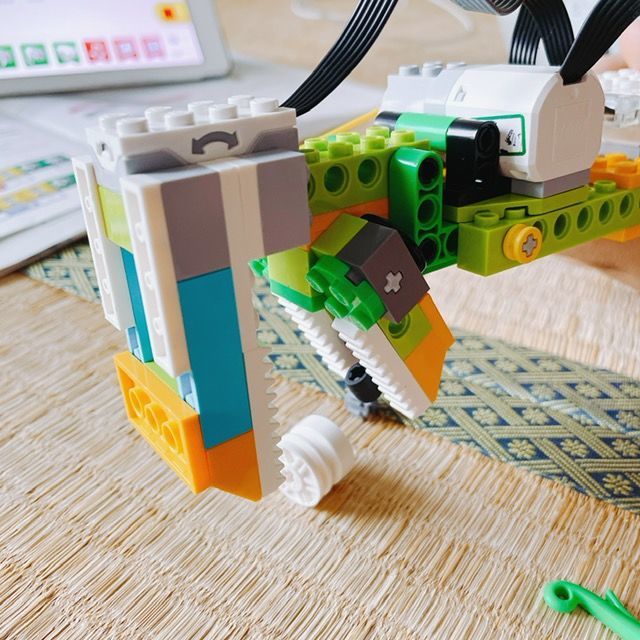
終了後、「つかむモデル」をヘビに改造。
レゴ公式アプリに組み立て方が載っています。


では、また次回のレポでお会いしましょう!
Z会プログラミングではLEGOの教材は終了しましたがその他のプログラミング講座があります。
気になる方は資料を取り寄せてみてくださいね。(アフィリエイトリンクです)
\ 自宅で楽しく学習しよう! /
LEGOプログラミング関連記事
>>#1 自宅でLEGOプログラミング(現在は終了している講座です)

>>LEGO SPIKEプライムとは?ロボットプログラミング家庭学習


